

Kilkanaście dni temu rozpocząłem opisywanie projektu niskobudżetowego skanera 3D do samodzielnego montażu o nazwie FabScan. W pierwszym odcinku serii przybliżyłem jego historię oraz przygotowałem listę niezbędnych elementów potrzebnych do jego skonstruowania. Wszystkie zakupy zrobione? No to możemy powoli zabrać się za montaż. Dzisiaj przygotujemy sobie wszystkie części elektroniczne.
Z założenia poradnik ma być łatwy do przyswojenia dla każdego, więc proszę bardziej obeznane osoby o wyrozumiałość, jeśli któreś fragmenty będą wytłumaczone zbyt dosadnie. Z drugiej strony, jeśli ktoś uzna, że używane przeze mnie nazewnictwo brzmi zbyt ogólnikowo, również proszę, aby mnie ewentualnie poprawił. Tyle tematem wstępu – wracamy do budowy skanera 3D…
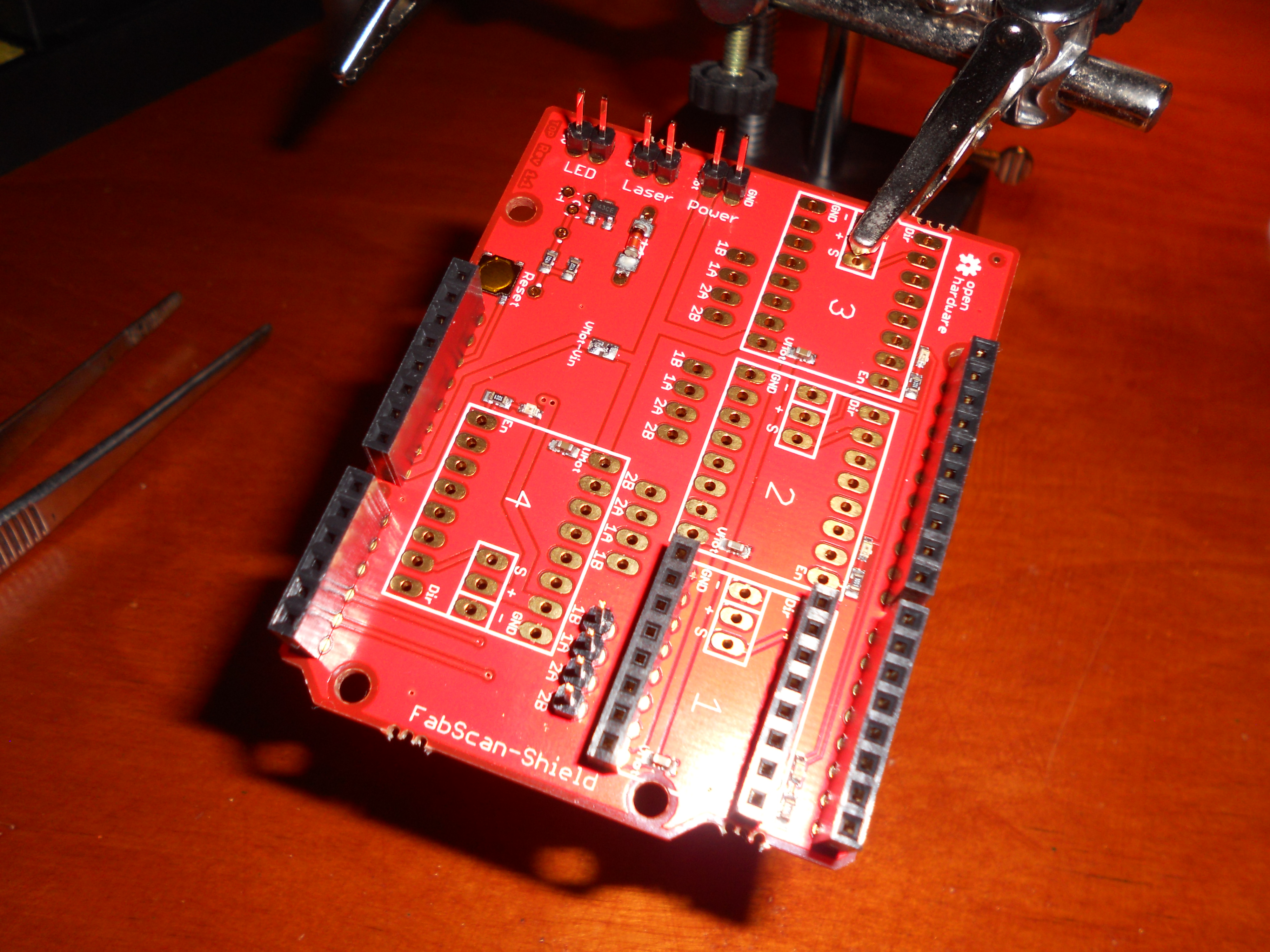
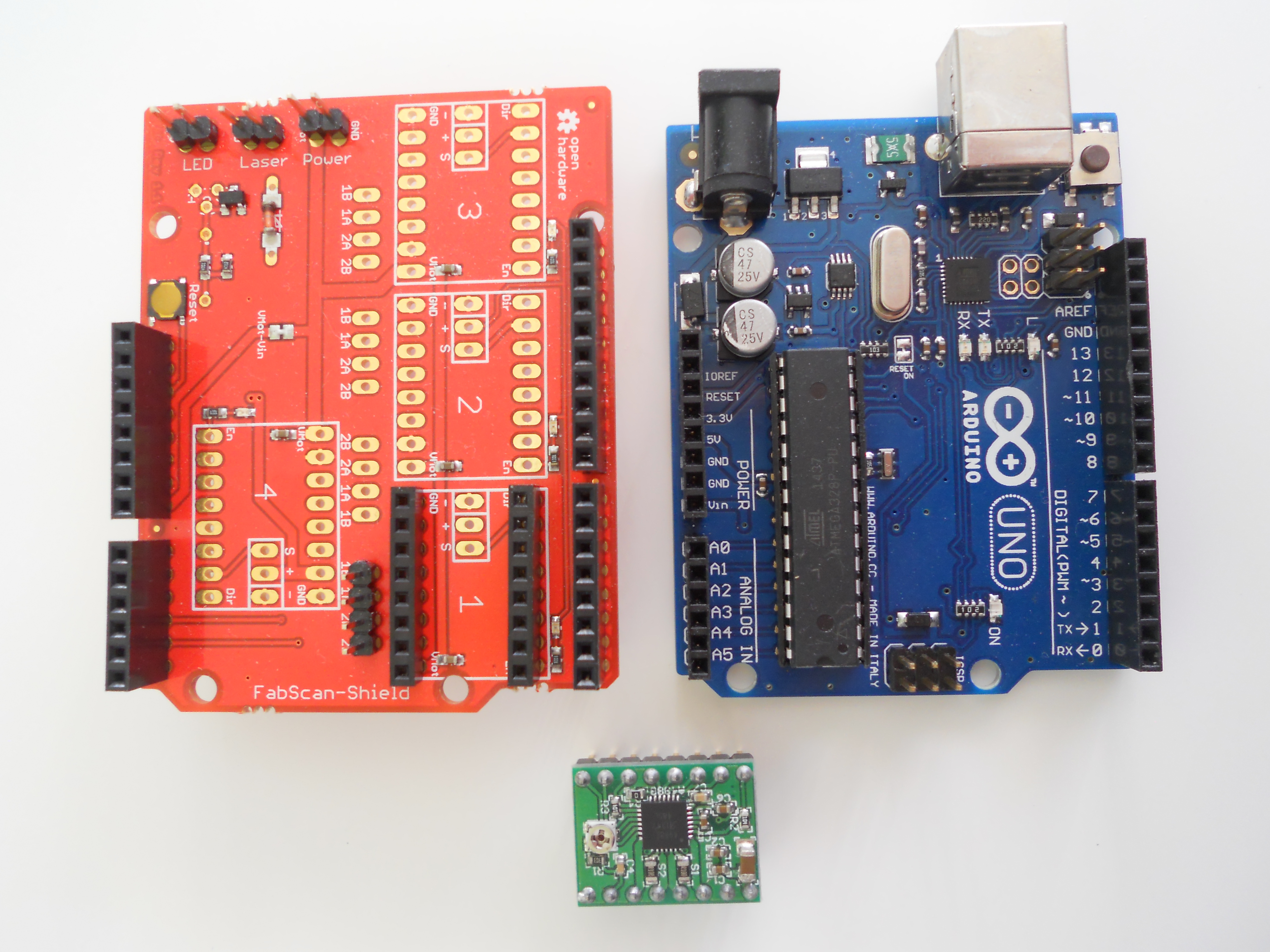
FabScan Shield
Jak wspomniałem w poprzednim artykule, płytka wysyłana jest do nas w kawałkach, więc trzeba ją polutować. Wprawdzie są w niej miejsca do podłączenia czterech silników, ale używać będziemy tylko jednego. Jeśli jesteśmy leniwi (a ja jestem), to można przygotować gniazda do podłączenia jednego tylko silnika i jednego stepsticka. Wystarczy, że przylutujemy piny, dzięki którym połączymy płytkę z Arduino tworząc tak zwaną „kanapkę”, dwie żeńskie listwy pinów do umiejscowienie sterownika silnika krokowego, cztery męskie piny do podłączenia silnika oraz dwa męskie piny do podłączenia lasera. Powinno to wyglądać tak, jak na zdjęciu poniżej.
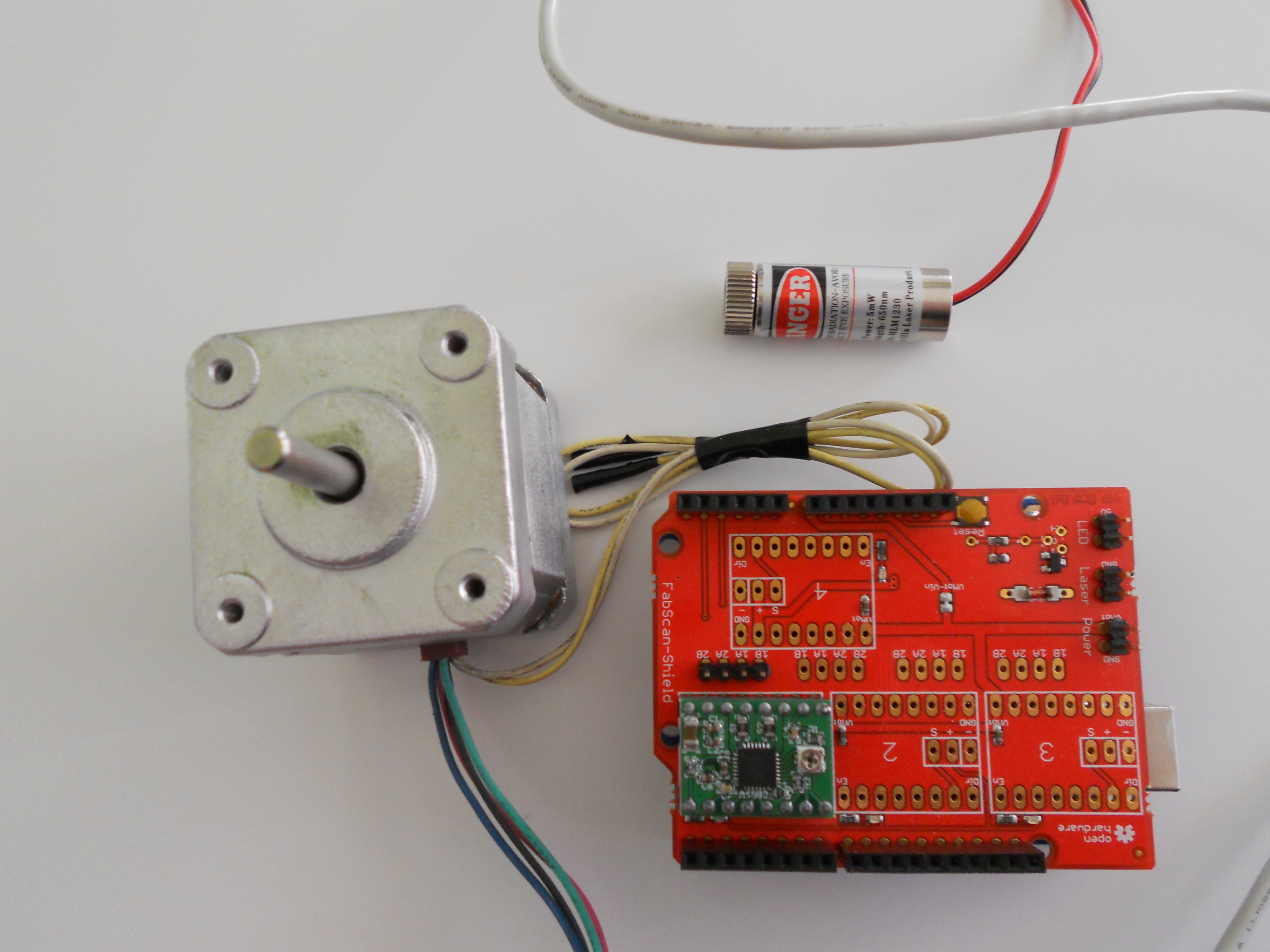
Silnik krokowy
Zastosowany przeze mnie silnik krokowy miał sześć przewodów (czarny, zielony, czerwony, niebieski, biały oraz żółty). Pomijamy więc dwa przewody od środka cewek (biały i żółty), a pozostałe podłączamy we wtyczkę, w kolejności czarny, zielony, czerwony, niebieski.
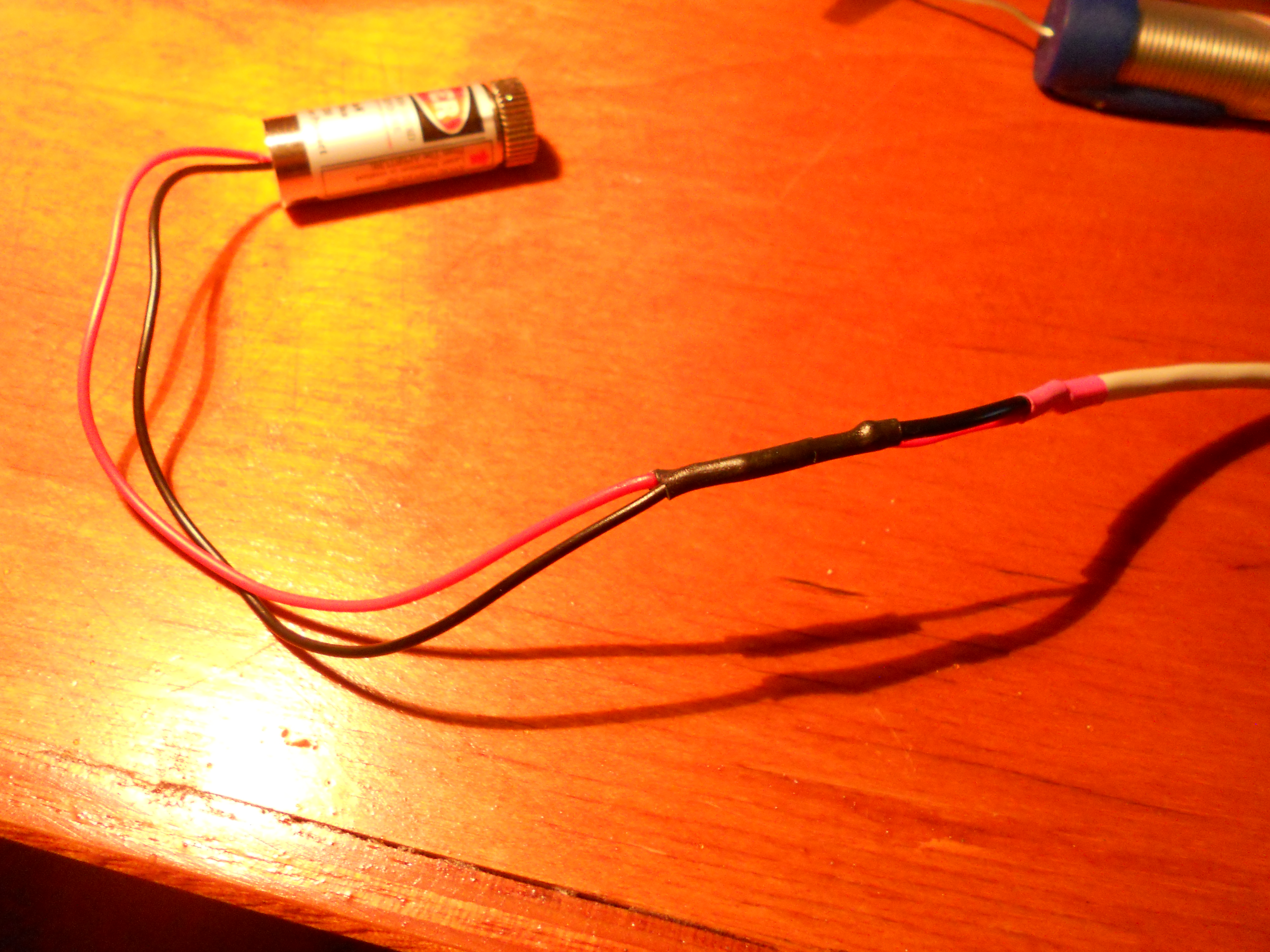
Laser liniowy
Przewody lasera na sto procent będą zbyt krótkie – trzeba je więc przedłużyć i zakończyć żeńską wtyczką na dwa piny.
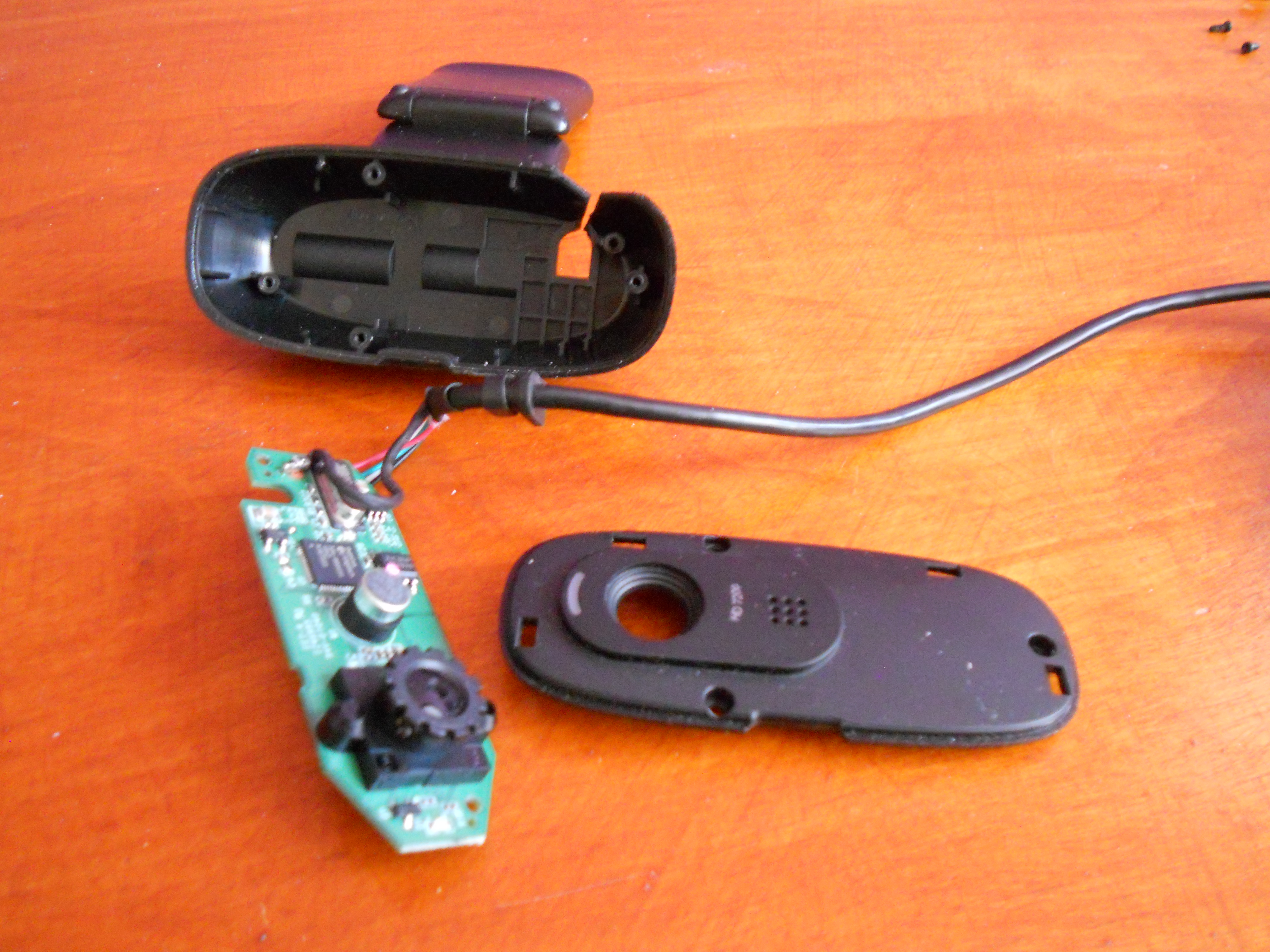
Kamerka
Najwięcej pracy jest z przygotowaniem kamerki internetowej Logitech C270.
- Zdejmujemy przedni panel z kamerki


- Odkręcamy trzy śruby, które pozwolą nam dostać się do środka

- Odkręcamy dwie śruby trzymające płytkę z kamerą w środku obudowy

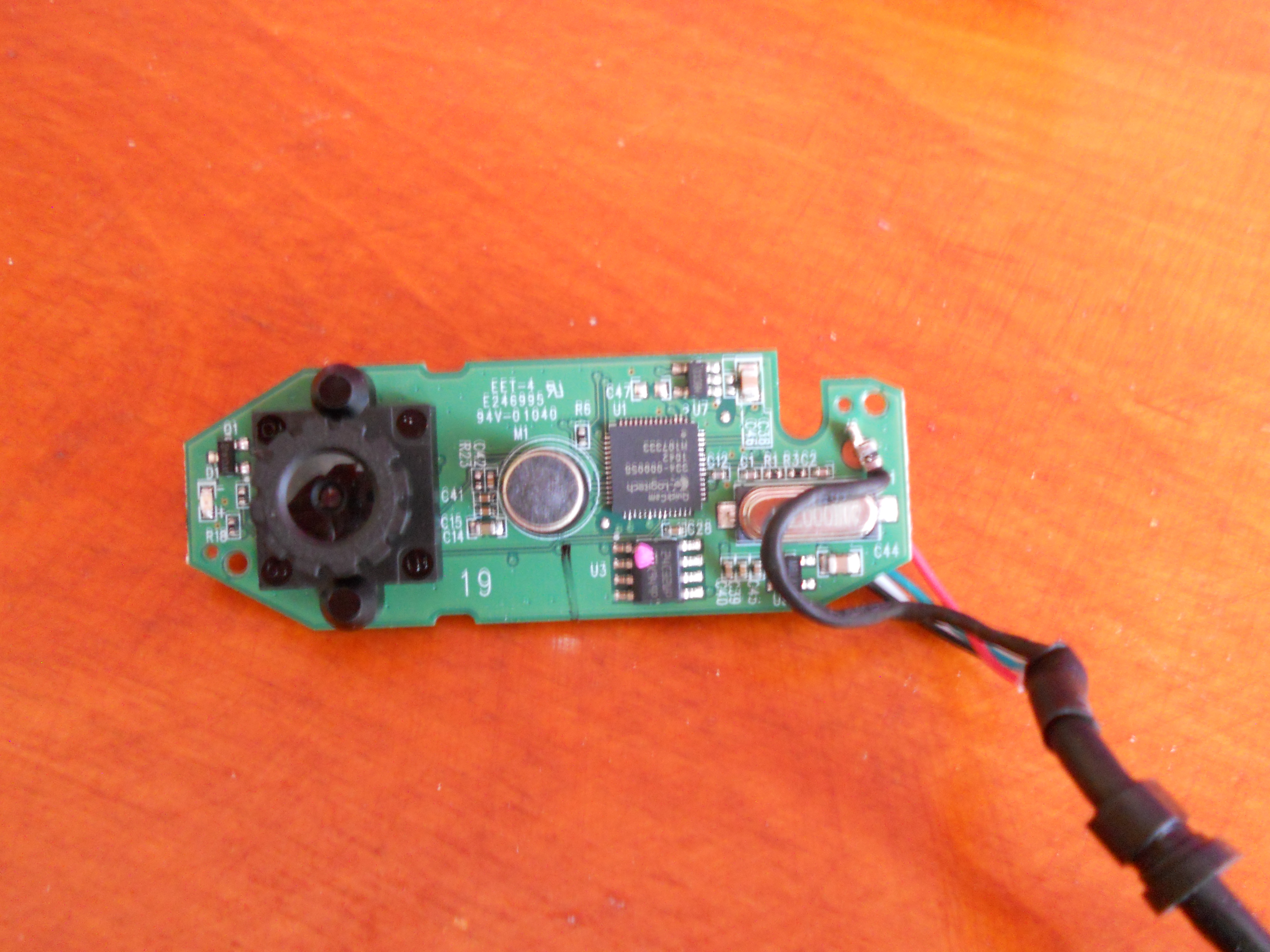
- Aby wyjąć płytkę z optyką ze środka można odłączyć jedną wtyczkę i odlutować drugi przewód, a później wszystko ponownie poskładać. Ja wybrałem jednak wersję destrukcyjną i za pomocą cążek wyciąłem w obudowie klin, prze który bez problemu usunąłem przewód

- Odblokowujemy możliwość manualnego ustawiania ostrości kamery. Zewnętrzny pierścień nad soczewką kamery jest za pomocą kropli kleju przyklejony do obudowy optyki. Delikatnie usuwamy klej, tak aby dało się kręcić pierścieniem. Będzie nam to potrzebne w dalszych częściach poradnika, do ręcznego ustawienia ostrości skanowanego obiektu

- Przy pomocy wiertła o średnicy 2 mm rozwiercamy delikatnie dwa otwory, za pośrednictwem których płytka była przykręcona do obudowy kamery.






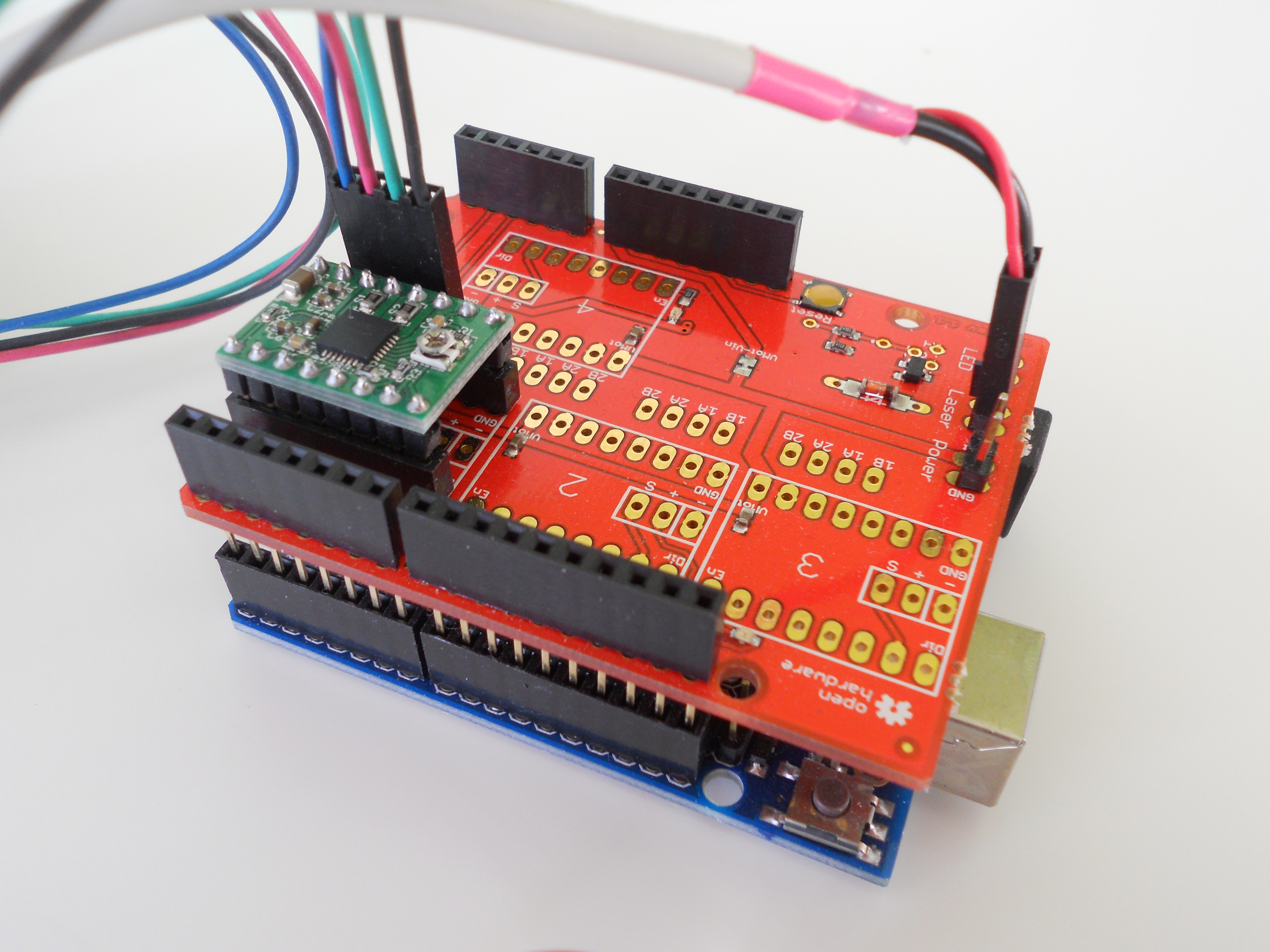
Składanie elektroniki
- Łączymy ze sobą Arduino, FabScan Shield oraz stepstic

- Podłączamy laser oraz silnik

- Całość powinna prezentować się w ten sposób

W kolejnej części zajmiemy się poskładaniem całej elektroniki oraz obudowy skanera 3D w całość.
