

Adrian Bowyer – legendarny twórca projektu RepRap, od chwili gdy w 2016 roku porzucił biznes amatorskich drukarek 3D, poświęcił się w całości na robieniu tego, co uczyniło go sławnym – wymyślaniu nowych wynalazków i udostępnianiu ich społeczności hobbystów i amatorów nowych technologii na licencjach open-source. W połowie 2019 roku Bowyer zaprezentował koncept „natychmiastowego” druku 3D przy użyciu prądu elektrycznego, a teraz przedstawia pomysł na nową metodę wytwarzania z wykorzystaniem tzw. „robotów montażowych”.
Źródłem inspiracji jest projekt Benjamina Jenetta i Neila Gershenfelda z bostońskiego MIT – ich robot porusza się się po budowanej przez siebie konstrukcji, umieszczając w dowolnym miejscu identyczne standardowe bloki sześcienne. Potrafi budować konstrukcje na dużą skalę – obiekty znacznie większe od samego siebie.
Po zapoznaniu się z nim, Bowyer uznał, że jest tu dość szerokie pole do innowacji:
- robot mógłby zostać zrobiony z bloków, które są takie same jak te, z których buduje konstrukcję; bloki robota byłyby aktywne: jeden rodzaj mogłyby obracać się wokół płaszczyzny środkowej bloku, a drugi byłby w stanie obracać się wokół jednej osi przez środek pary przeciwległych powierzchni
- przez bloki przepływałaby energia elektryczna oraz sygnały (np. instrukcje ruchu lub montażu); w ten sposób robot nie musiałby być zasilany samodzielnie, tylko pobierać moc z siebie i budowanej konstrukcji zarazem
- robot posiadałby dwa mechanizmy mocujące: magnesy, które mocowałyby poszczególne bloki i równocześnie pozwalałyby na ich późniejsze usunięcie i montaż w innym w innym miejscu oraz klej, który trwale by je sklejał; klej byłby nakładany dopiero wtedy, dany blok znalazłby się w docelowym miejscu.
Pierwszy koncept na razie nie wygląda zbyt zachęcająco, ale pamiętajmy, że stoi za tym Adrian Bowyer – człowiek, dzięki któremu ~95% z Was ma możliwość pracy na drukarkach 3D:
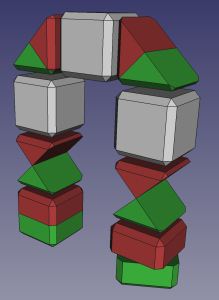
Czerwone i zielone bloki mają być ruchome i będą obracać szarymi, pasywnymi blokami, które pełnią funkcję budulcową. Tego typu robot będzie w stanie zbudować kopię samego siebie i skleić się w całość. Poszczególne części, z których będą składać się bloki mają być oczywiście wydrukowane na drukarce 3D typu RepRap (podejrzewam, że na innej też…) i jedyne co będzie potrzebne to oczywiście silniki i elektronika.
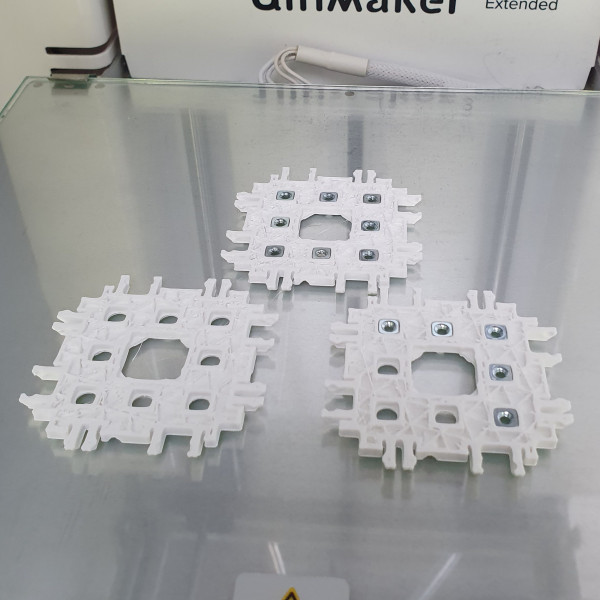
Tak wyglądają prototypy bloków pasywnych:
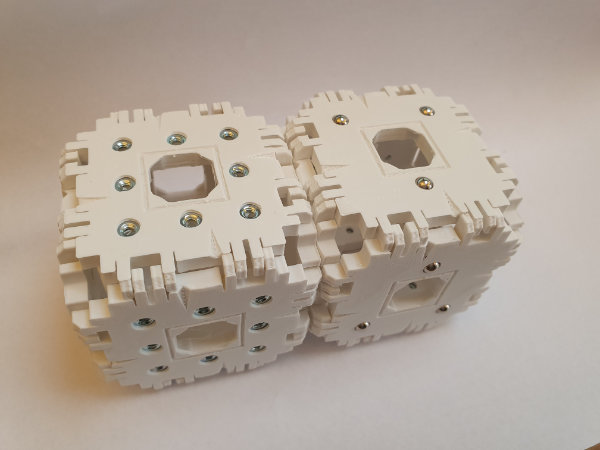
Bloki mają dwa rodzaje powierzchni: trzy z trzema osadzonymi kulami, które są magnesami o średnicy 5 mm i trzy z ośmioma osadzonymi nakrętkami, które służą do montowania magnesów w dowolnej z czterech możliwych orientacji. Elementy zostały wydrukowane na płasko, a następnie połączone ze sobą wzdłuż ich krawędzi. Na każdej krawędzi pozostawiono także wgłębienia w kształcie klina, na które można nanieść niewielką ilość kleju cyjanoakrylowego w celu trwałego zespojenia konstrukcji.
Ośmiokątne otwory w środku każdej ścianki służą z kolei do zamocowania płytki PCB o grubości 15 mm2 z czterema sprężystymi stykami, aby połączyć ze sobą kostki. Dwa z nich będą zasilane, a dwa będą odpowiadały za przesyłanie danych zarówno w trakcie montażu, jak i po jego zakończeniu.
Projekt Bowyera jest niezwykle ambitny, ponieważ roboty będą musiały nie tylko stosować zaawansowane oprogramowanie koordynacyjne, ale także zostać wyposażone w system selektwynego nakładania kleju. Jeżeli system samobudujących się i replikujących robotów uda się zrealizować, może prowadzić to do bardziej zaawansowanych wersji, które mogą doprowadzić do rewolucji w zakresie tworzenia konstrukcji na praktycznie dowolnym obszarze.
Projekt jest rozwijany naturalnie na licencji open-source.
Źródło: www.reprapltd.com

