W ostatniej części naszego poradnika przygotowaliśmy skaner 3D do pracy. Wgraliśmy firmware oraz utworzyliśmy pendrive z bootowalną wersją systemu Ubuntu FabScan. Dzisiaj dokonamy pierwszego uruchomienia, skonfigurujemy oraz skalibrujemy nasze urządzenie. Wykonamy też pierwszy skan 3D.
Do tej pory opublikowaliśmy cztery części poradnika: część I – kompletowanie potrzebnych części mechanicznych, część II – kompletowanie części elektronicznych, część III – montaż, część IV – wgrywaniem firmware’u do Arduino UNO oraz przygotowaniem pendrive’a z zainstalowanym systemem operacyjnym Ubuntu FabScan.
Podłączanie skanera 3D:
- Podłączamy sterownik (niebieski kabel) i kamerę skanera do portów USB komputera. Powinien zapalić się promień lasera.
- Podłączamy sterownik do prądu.
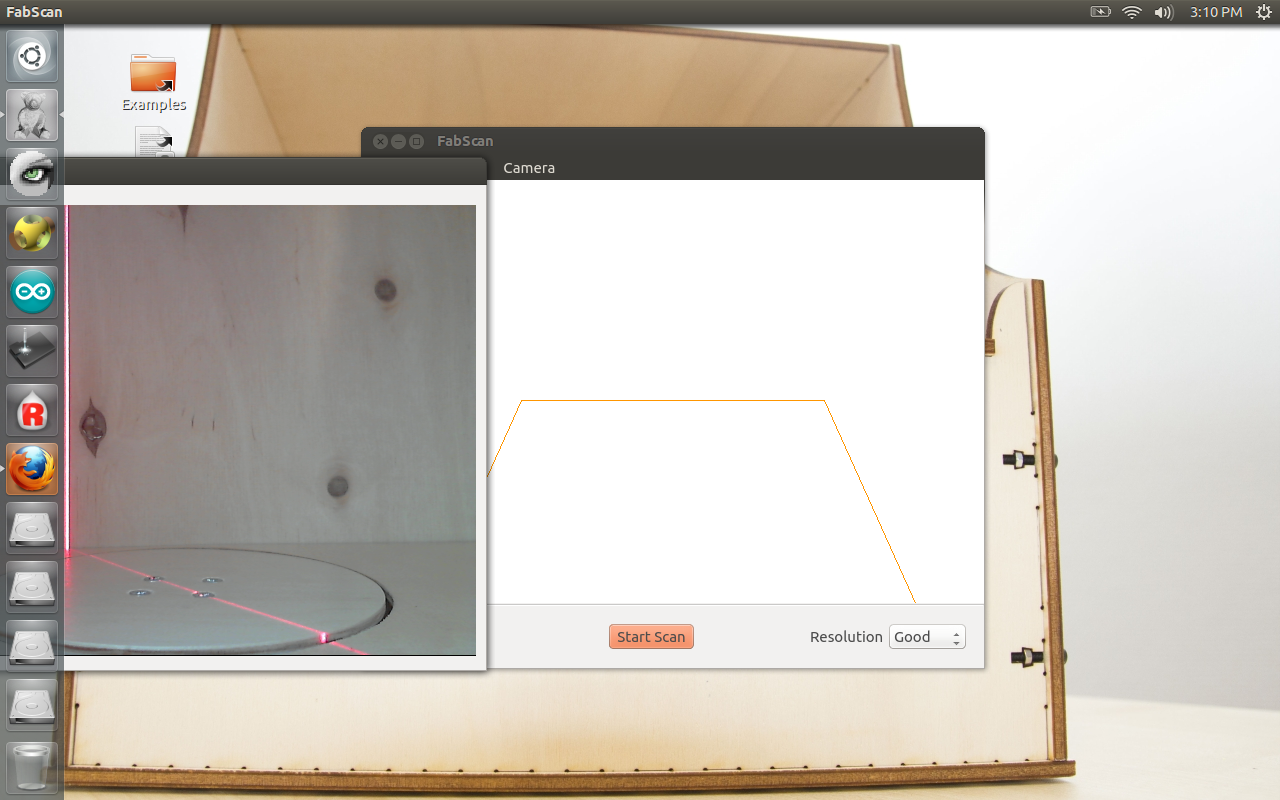
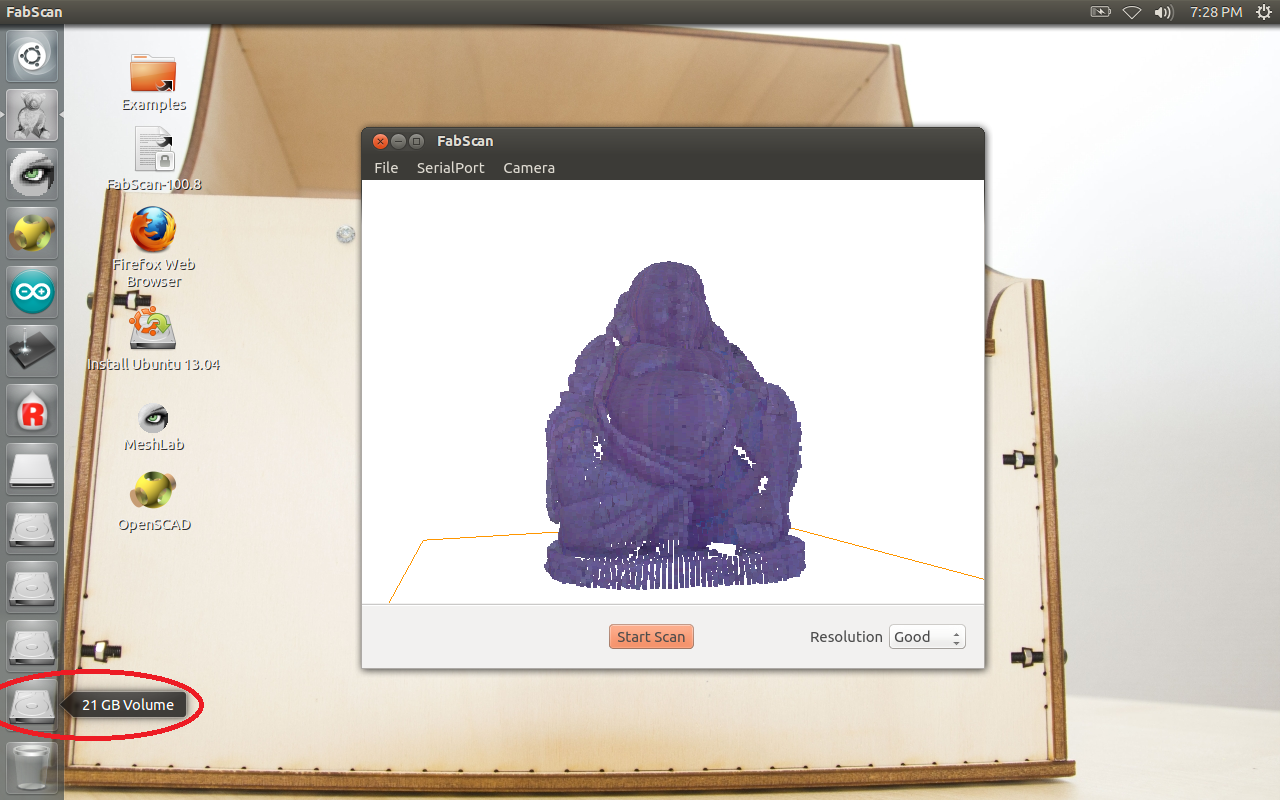
- Klikamy ikonkę „FabScan”.

- W otwartym oknie klikamy w menu „Camera” i wybieramy opcję „UVC Camera (046d:0825)” (menu może się przyciąć na kilka sekund).

- Z menu „Serial Port” wybieramy „ttyACM0”. Laser powinien szybko mrugnąć, co oznacza, że sterownik został prawidłowo podłączony.



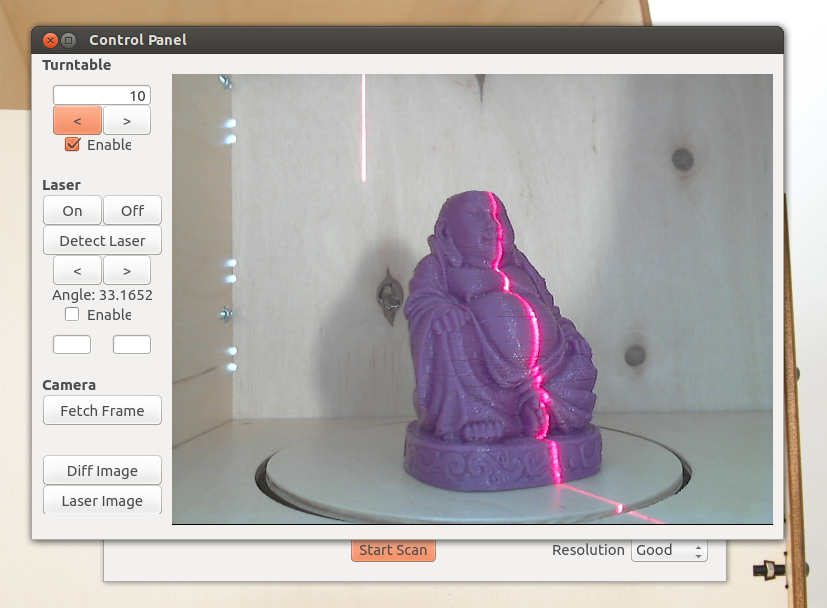
Panel kontrolny i kalibracja:
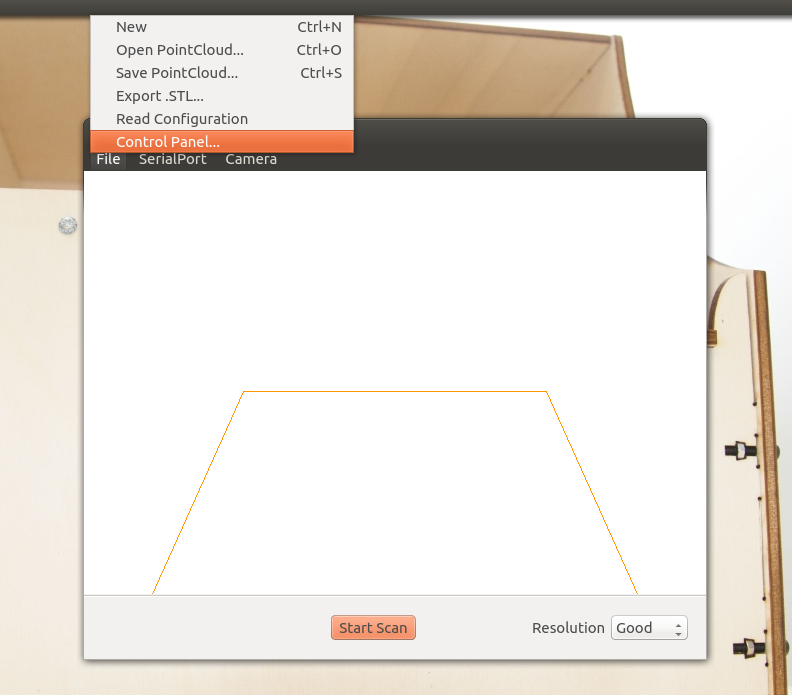
- Z menu „File” wybieramy „Control Panel”.

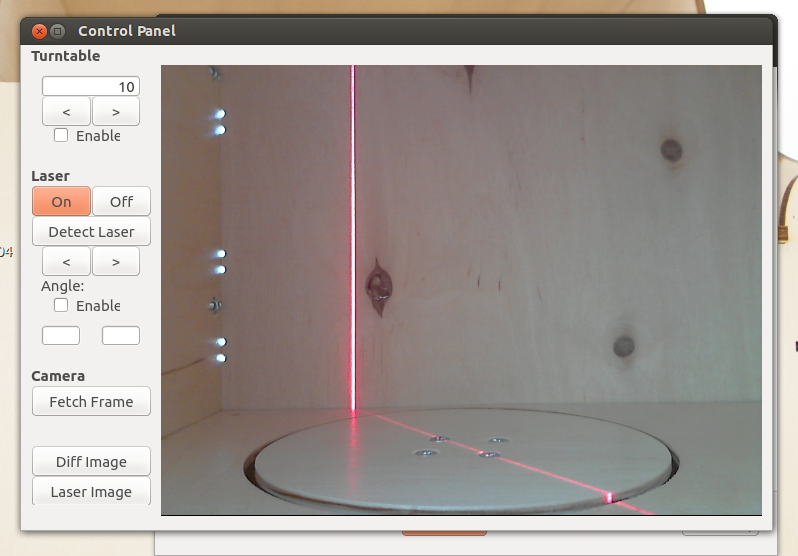
- Powinniśmy zobaczyć obraz z kamery wraz z widoczną linią lasera.

- Jeżeli jest to konieczne, ustawiamy ostrość kamery, kręcąc pierścieniem przy obiektywie, starając się uzyskać jak najbardziej ostry obraz. Najłatwiej jest to zrobić ustawiając jakiś przedmiot na środku obrotowego stołu.
- Jeżeli jest taka potrzeba, ustawiamy ostrość linii lasera, kręcąc pierścieniem na jego końcu. Należy dążyć do uzyskania jak najcieńszej linii, pamiętając przy tym, aby pozostała ona pionowa. Pionowość linii najłatwiej ustawić jest przesuwając okno widoku kamery w lewą stronę pulpitu, tak aby część okna przesłonięta była bocznym menu Ubuntu. Można wtedy wykorzystać powstałą krawędź do ustawienia skanera 3D idealnie pionowo tak jak na zdjęciu poniżej.

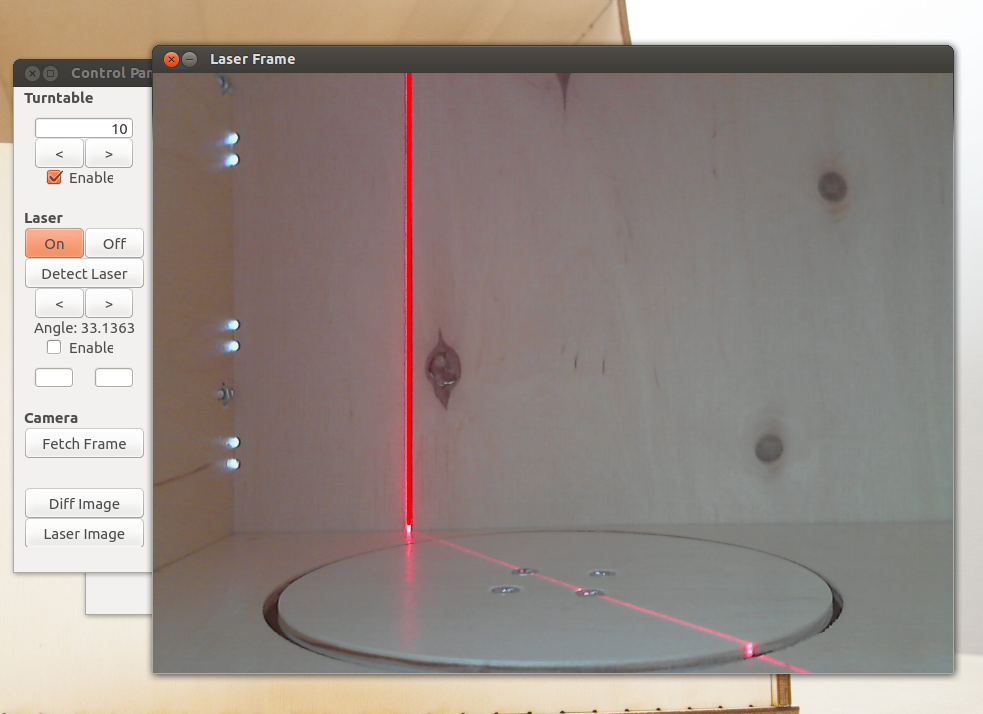
- Ustawiamy laser tak, aby był wycelowany na środek obrotowego stołu. W tym celu możemy posłużyć się dwiema śrubami stolika. Przekręcamy laser w lewo/prawo, tak aby jego linia pokryła się z linią wyznaczoną przez dwie śruby leżące po przekątnej, tak jak na zdjęciu poniżej.

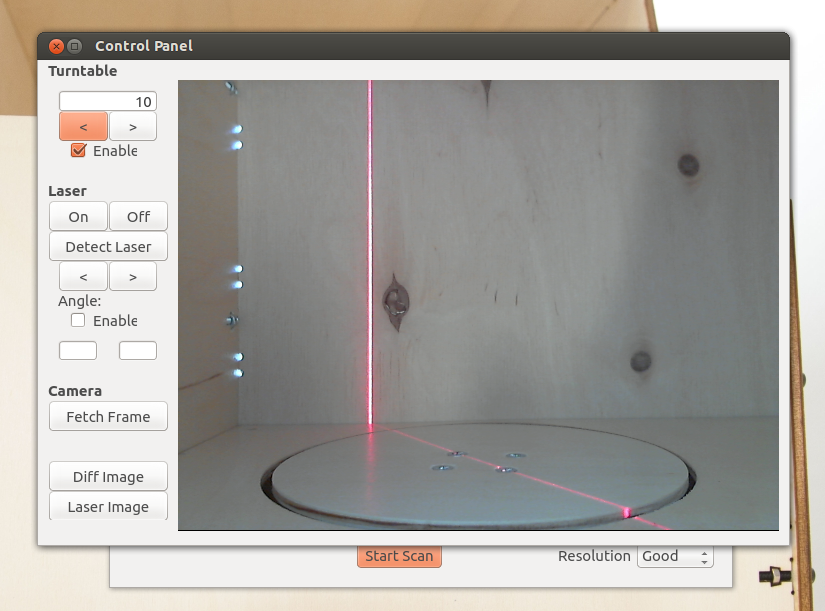
- W sekcji „Turnable” zaznaczamy opcję „Enable” (jak na zdjęciu powyżej).
- Klikamy w przycisk „Detect laser”, aby sprawdzić czy laser jest wykrywany przez oprogramowanie.

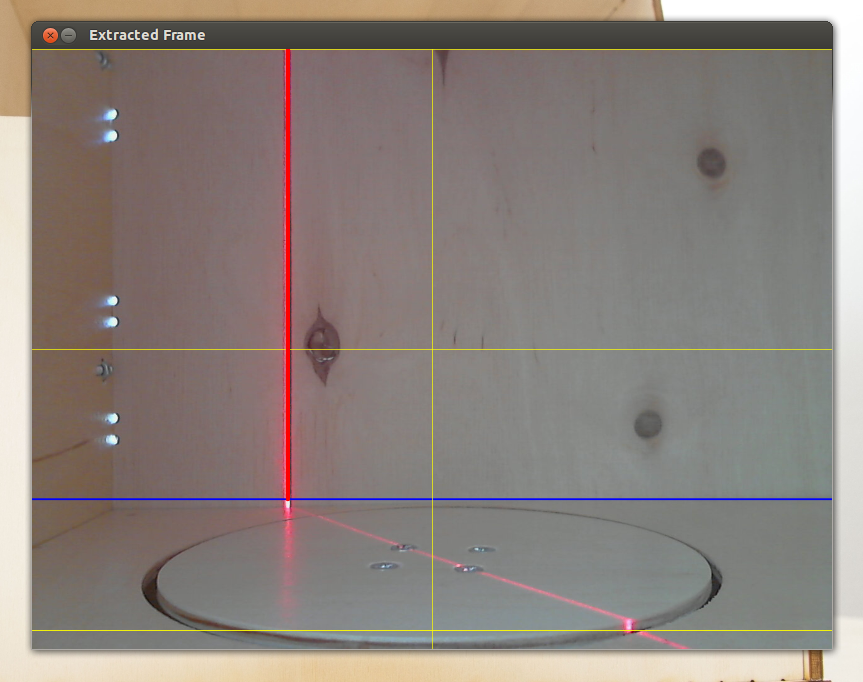
- Klikamy przycisk Fetch Frame.

Żółta pionowa linia powinna wskazywać środek obrotowego stołu. Stolik natomiast powinien znajdować się mniej więcej pomiędzy niebieską, a żółtą poziomą linią. Poza tym możemy jeszcze raz zweryfikować pionowość linii lasera. Warto też wcześniej przy pomocy małej poziomicy sprawdzić wypoziomowanie stolika.
- Ustawiamy przedmiot do skanowania na stoliku i zamykamy okno „Control Panel”.

Uwaga 1. Skanowany przedmiot należy przykleić taśmą dwustronną, aby nie przemieszczał się w czasie skokowych ruchów stolika.
Uwaga 2. Na samym początku, zanim zaznaczymy opcję Enable, należy umieścić przedmiot na stole i ręcznie nim obracając, zweryfikować jego ustawienie na stole, tak aby linia lasera była dobrze widoczna w kamerze. Dotyczy to głównie przedmiotów o nieregularnych kształtach. Z reguły najwyższy element przedmiotu powinien znaleźć się w osi stolika.
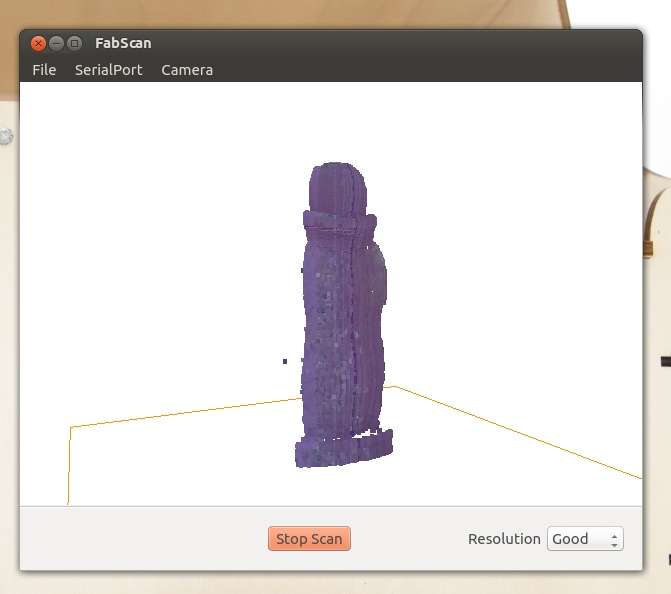
Skanowanie 3D:
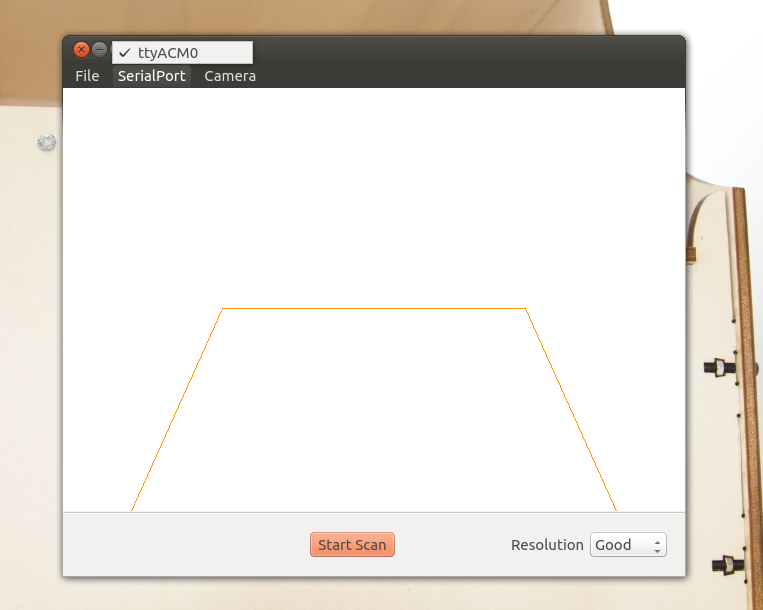
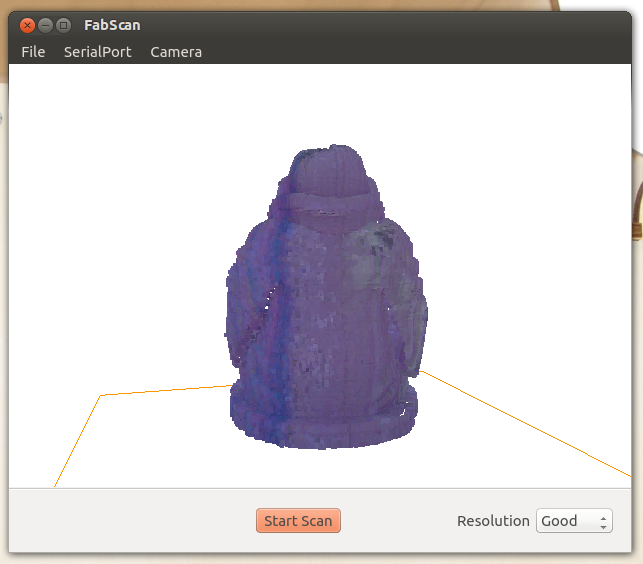
- Z menu „Resolution” wybieramy jakość. Optymalnym rozwiązaniem czasowym i jakościowym jest opcja „Good”. Opcja „Best” zajmuje bardzo dużo czasu i przeznaczona jest tylko dla bardzo mocnych komputerów. Tak naprawdę każda próba skanowania w najwyższej rozdzielczości kończyła się w moim przypadku zawieszeniem programu.
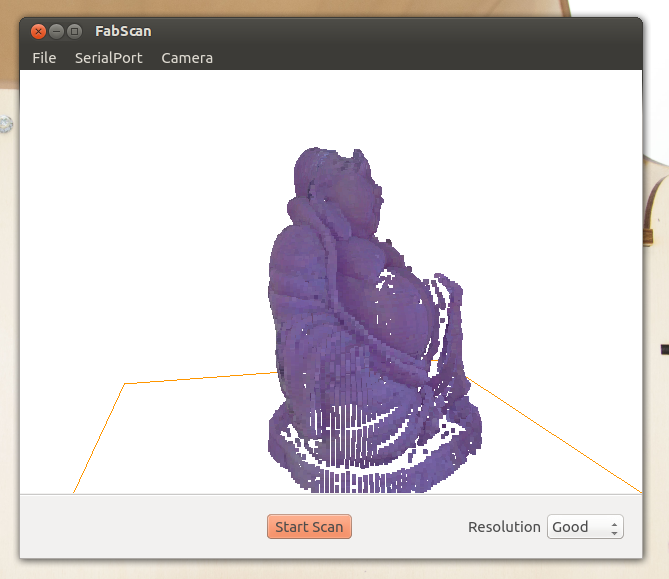
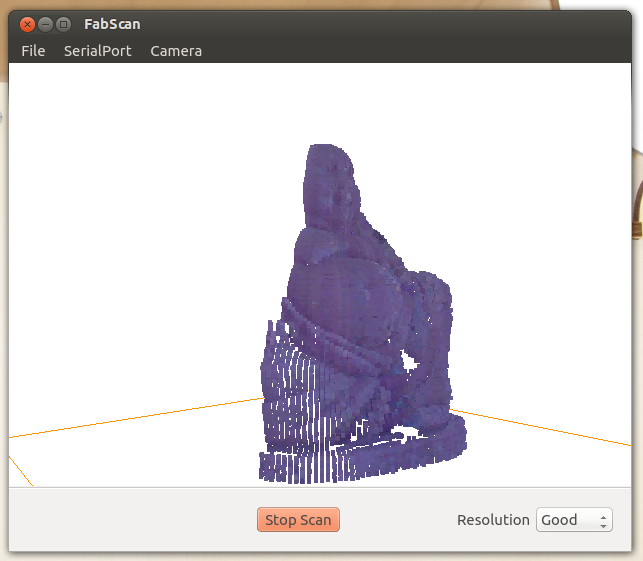
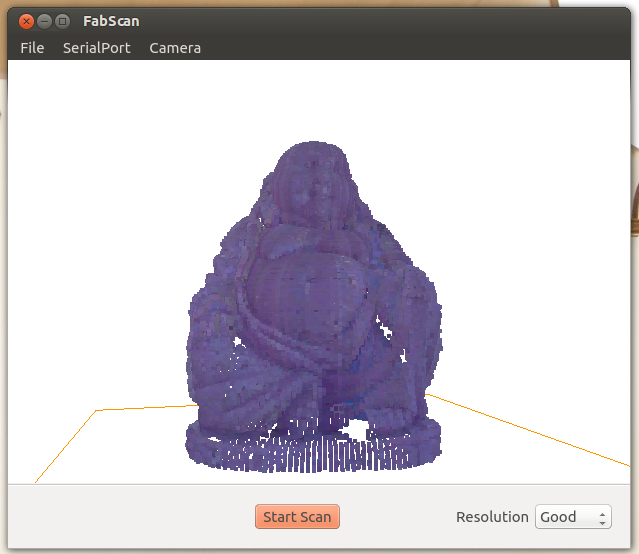
- Klikamy przycisk „Start Scan” rozpoczynając tym samym proces skanowania 3D.





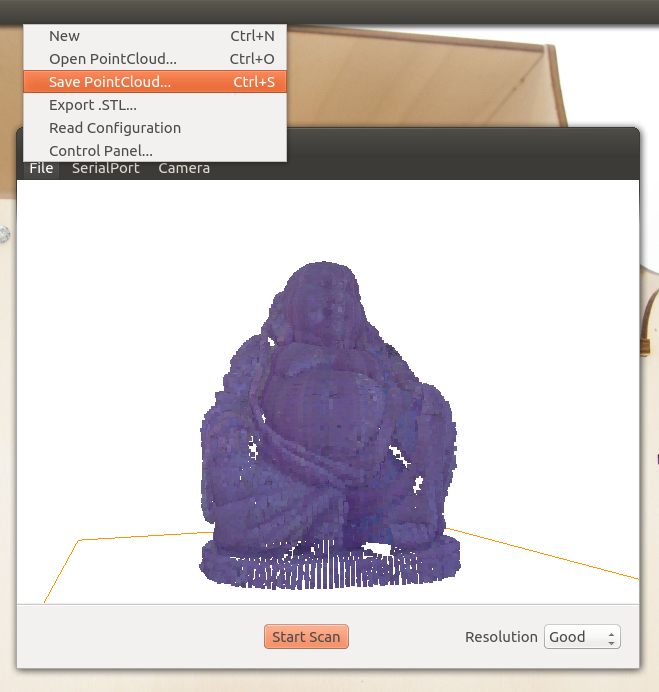
- Po zakończeniu skanowania zapisujemy chmurę punktów do pliku klikając w menu „File>Save PointCloud” (niestety w programie nie działa bezpośredni eksport do formatu STL).

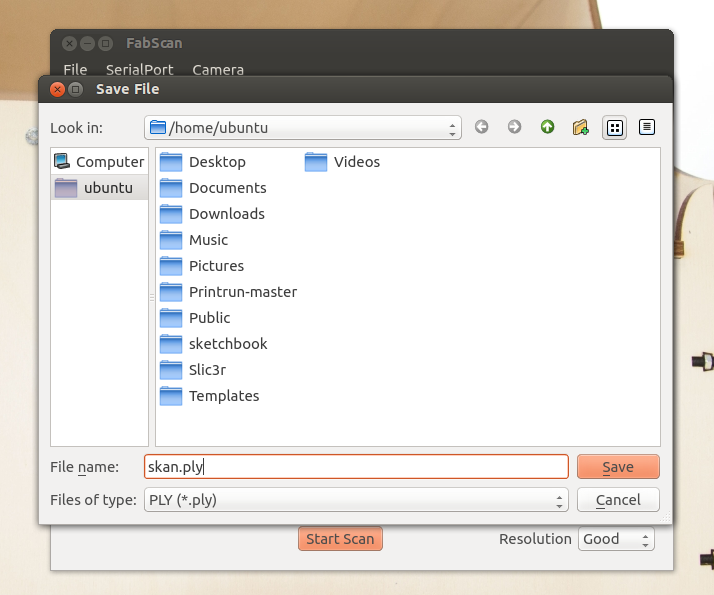
- Jako miejsce zapisu zaleca się wybranie sugerowanego przez program miejsca. Wybieramy format „PLY(*.ply)”, podajemy nazwę pliku w formacie „skan.ply” (dodanie po nazwie rozszerzenia .ply jest bardzo istotne).

Możemy zamknąć program FabScan.

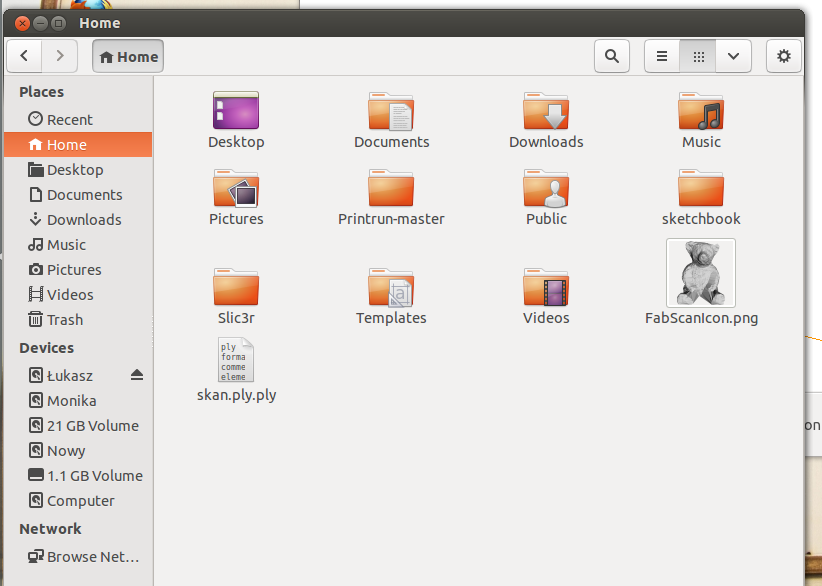
- Aby znaleźć zapisany plik klikamy w dowolny, dostępny dysk w bocznym menu Ubuntu.

Następnie przechodzimy na zakładkę „Home”, gdzie widzimy nasz plik zapisany jako „skan.ply.ply”.
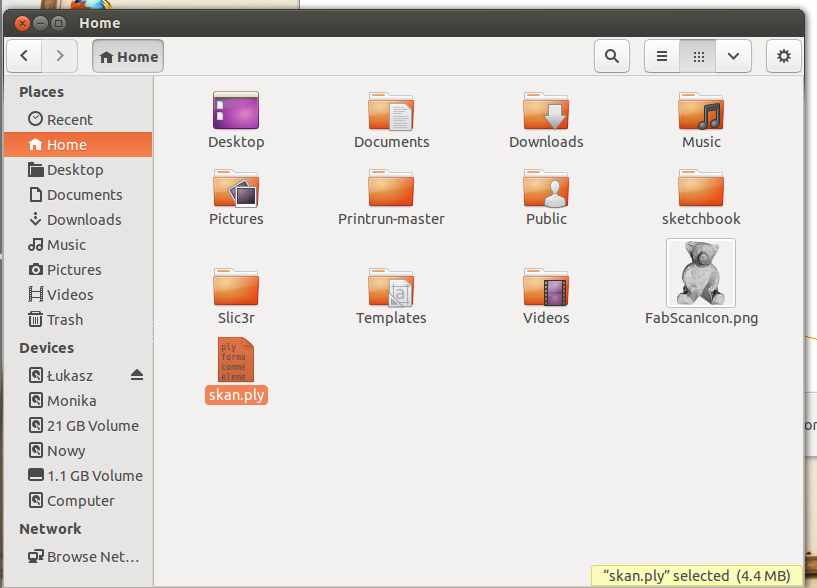
Klikamy w plik i zmieniamy mu nazwę na „skan.ply”.
Jeżeli chcemy możemy przekopiować plik na dowolny dysk widoczny później również z poziomu Windowsa. Jeżeli zamierzamy przetworzyć plik na format STL to kopię pliku pozostawiamy również w tym miejscu.
Konwersja pliku PLY na STL:
- Otwieramy program „MeshLab”.

- Wybieramy „File>Import Mesh…” i odnajdujemy nasz plik „skan.ply”.
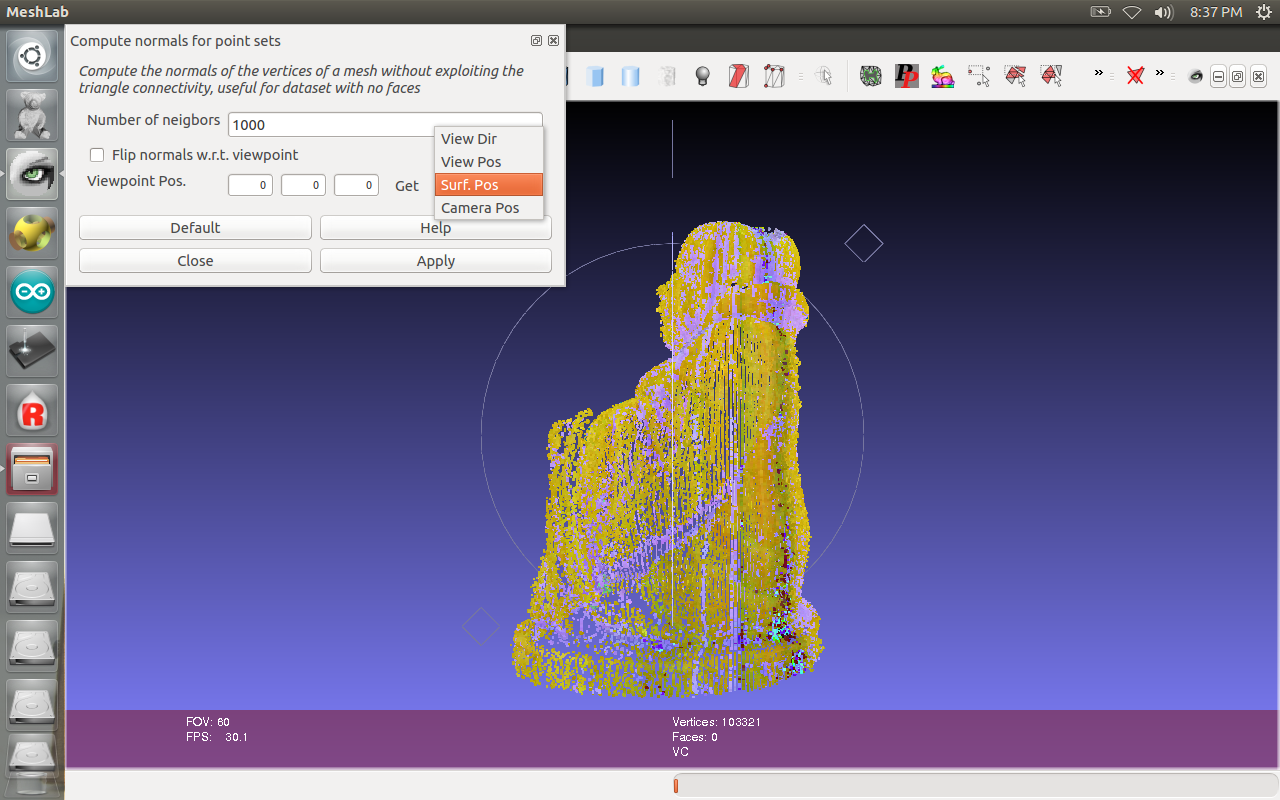
- Po wczytaniu naszej chmury punktów wybieramy z menu „Filters>Normals, Curvatures and Orientation> Compute normals for point sets”.
- W otwartym oknie w polu „Numbers of neigbors” wpisujemy wartość np. 1000 (jest to wartość przykładowa, z którą warto poeksperymentować, dla mocniejszych komputerów można wpisać ją większą, jednak przy 1000 otrzymujemy przyzwoite rezultaty). W polu „Get” z rozwijanej listy wybieramy „Surf. Pos”. Na koniec zatwierdzamy procedury przyciskiem „Apply” i czekamy, aż zostaną wykonane (może to potrwać nawet kilka minut).


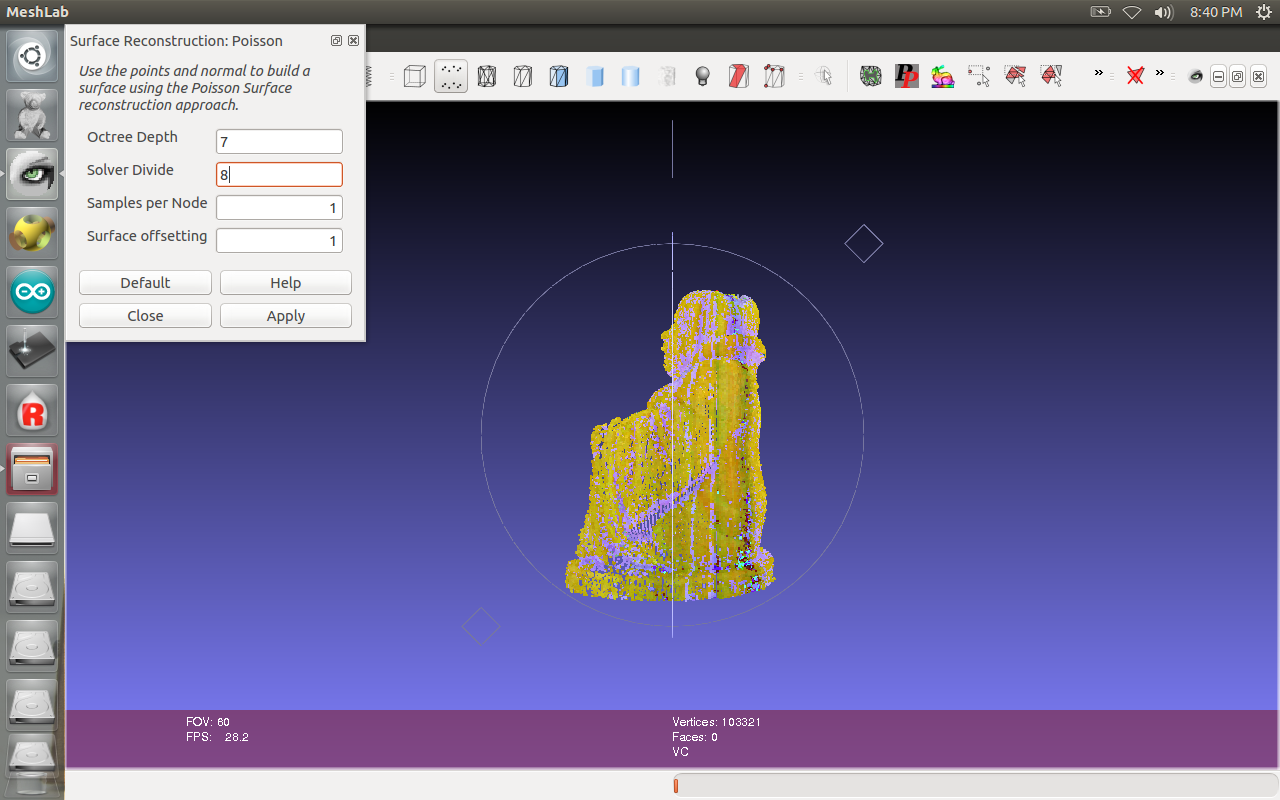
- Z menu wybieramy opcje “Filters>Point Set>Surface Reconstruction: Poisson”. W otwartym oknie w polu „Octree Depth” wprowadzamy wartość 7, natomiast w polu „Solver Divide” wartość 8 (są to wartości, przy których otrzymujemy dobre rezultaty, ale warto z nimi poeksperymentować). Zatwierdzamy zmiany przyciskiem „Apply” i ponownie czekamy kilka minut na wynik obliczeń.

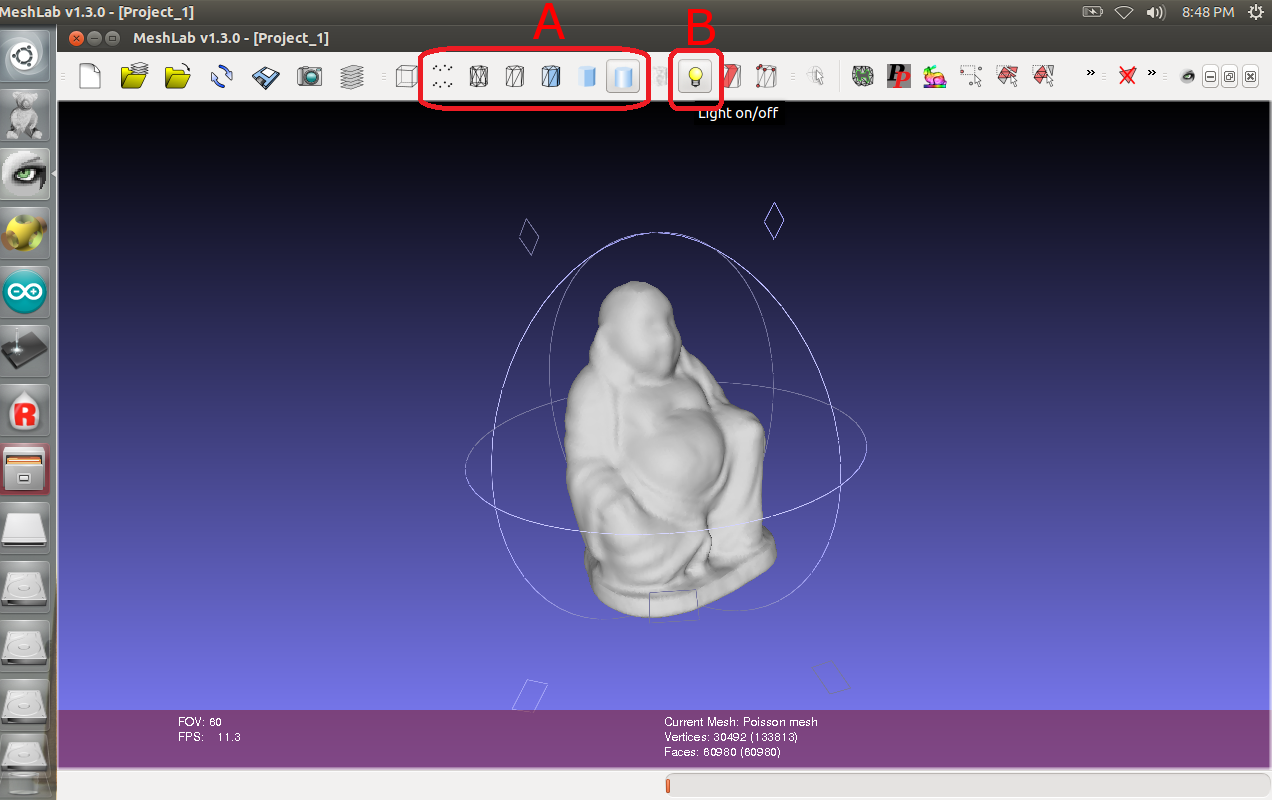
- Za pomocą przycisków z sekcji „A” można przełączać różne widoki uzyskanej powierzchni. Za pomocą przycisku „B” uzyskujemy włączenie cieniowania. Jeżeli cieniowanie się nie włączy to używamy różnych kombinacji z menu „Render”, np. „Color>None i Lighting>Double side lighting”.

- W celu eksportu pliku wybieramy menu „File>Export Mesh As…” . W otwartym oknie w polu „Files of type”, z rozwijanej listy wybieramy „STL File Format (*.stl)”. W polu „File name” wpisujemy nazwę pliku z rozszerzeniem .stl, np. „skan2.stl” i klikamy „Save”.


Tak przygotowany plik możemy już np. wydrukować na drukarce 3D.
Przykładowy skan 3D wykonany na FabScan’ie można pobrać stąd.
To już ostatnia część naszego poradnika budowy własnego skanera 3D. Być może w najbliższym czasie opublikujemy jeszcze epilog przedstawiający porównanie skanów z FabScan’a ze skanami 3D z komercyjnego skanera Sense od 3D Systems.